Tras la última entrada del blog centrada en cómo el trazado geométrico en planta de carreteras influye en la operación de los actuales vehículos autónomos presentes en el mercado automovilístico, hoy trataremos de mostrar el impacto de los acuerdos convexos en la operación de estos vehículos.

Figura 1. Acuerdo convexo.
Esta investigación, como la que se presentó previamente, fue desarrollada por el Grupo de Investigación en Ingeniería de Carreteras (GIIC) de la Universitat Politècnica de València donde realizo la mayor parte de mi actividad investigadora.
Objetivo
El principal objetivo de esta investigación fue identificar bajo qué condiciones geométricas los actuales sistemas autónomos ceden el control del vehículo a los conductores al recorrer acuerdos convexos solapados con rectas en planta.
Para ello, se analizó el funcionamiento del sistema Lane Keeping Assist (LKA) al recorrer un total de 50 acuerdos convexos localizados en carreteras convencionales, carreteras multicarril y autovías. Estos acuerdos se recorrieron a la velocidad límite de la vía y se examinó si el sistema cedía o no el control al conductor, es decir, si era capaz o no de recorrer los acuerdos convexos estudiados de manera autónoma.
Fundamentos teóricos
De acuerdo al Green Book – guía de diseño propuesta por la American Association of State Highway Transportation Officials (AASTHO) – el parámetro K de un acuerdo vertical define cuán brusco es. En este sentido, cuanto más pequeño es K, más brusco es el acuerdo (Figura 2). Este se calcula como el cociente entre la longitud del acuerdo (L) y la diferencia algebraica de las inclinaciones de las rasantes adyacentes (A). Dado un determinado K, la distancia de visibilidad de parada puede calcularse como:
donde SSD es la distancia de visibilidad parada (m); L es la longitud del acuerdo (m); A es la diferencia de inclinaciones (%); h1 es la altura de los ojos del conductor sobre la carretera (1.08 m); y h2 es la altura del objeto sobre la superficie de la carretera (0.60 m).
Esta SSD la podemos etiquetar como la distancia de visibilidad disponible (SSDA) ya que representa la longitud de carretera que puede ser vista bajo unas condiciones geométricas determinadas.
Adicionalmente, existe una relación biunívoca entre la velocidad de diseño (Vd) y la distancia de visibilidad de parada. Para una velocidad de diseño dada, la SSD puede ser estimada como:
donde Vd es la velocidad de diseño (km/h); t es el tiempo de percepción-reacción (2.5 s); y a es la tasa de deceleración (3.4 m/s2). De esta forma, dPRT es la distancia recorrida mientras el conductor percibe el riesgo y decide frenar y dMT es la distancia recorrida mientras que se produce el frenado.
Esta SSD es la distancia de visibilidad requerida (SSDR) puesto que indica cuál es la distancia mínima necesaria para que un vehículo frene dada una cierta velocidad. El Green Book, al igual que la actual instrucción de carreteras en España, asume que los vehículos circulan a la velocidad de diseño, por lo que SSDR≤SSDa es sinónimo de un diseño adecuado.
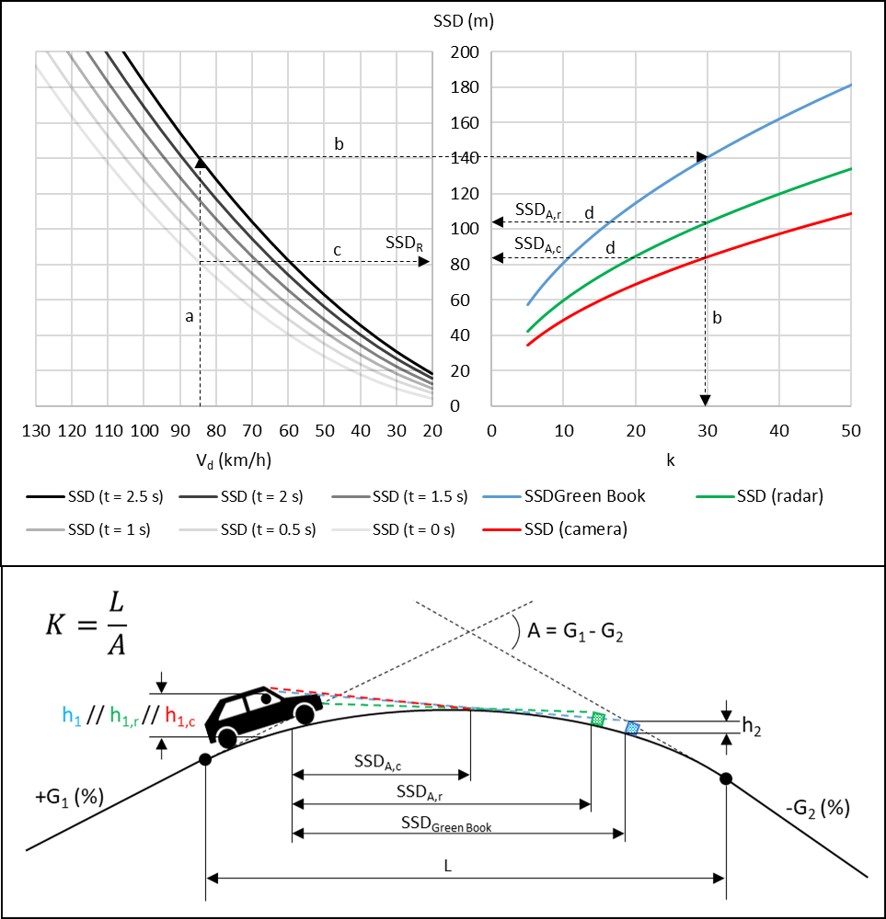
Figura 2. Relación entre SSD, K y Vd.
Distancias de visibilidad requeridas por el vehículo autónomo
El Green Book asume valores fijos para la determinación de SSD, pero estos valores deben ser modificados para los dispositivos – cámara y radar – que vienen instalados en los vehículos autónomos. Por tanto, SSDA,r es la distancia de visibilidad disponible para el radar y SSDA,c es la disponible para la cámara (Figura 2, superior derecha).
Normalmente, las vídeo cámaras están instaladas en el retrovisor interior del vehículo y son las responsables del sistema Lane Keeping Assist (LKA). Por tanto, la visibilidad disponible debería ser estimada considerando un valor de h1 entre 1 y 2 m, mientras que h2 debe ser 0 m (altura de las marcas viales).
Por otro lado, el radar se ubica en el parachoques del vehículo y se encarga de la detección de objetos. En este sentido, podemos hablar de una h1 entre 0.25 y 0.45 m y una h2 de 0.60 m de acuerdo al Green Book (altura de objeto predeterminada).
Adicionalmente, los tiempos de percepción y reacción también cambian para el sistema autónomo. No obstante, los fabricantes de vehículos autónomos no proporcionan datos sobre el lag que estos dispositivos requieren para procesar la información y tomar una decisión. Por ello, en este estudio, la distancia de visibilidad requerida (SSDR) por el sistema autónomo se estimó considerando tiempos de percepción-reacción entre 0 y 1 s.
De nuevo, un acuerdo convexo estará bien diseñado siempre y cuando la distancia de visibilidad requerida (SSDR) sea menor que la disponible para ambos dispositivos. Como ejemplo, SSDR para una velocidad de diseño de 85 km/h es 140 m (Figura 2: a). De acuerdo al Green Book, el parámetro K mínimo que permite esta visibilidad es 30 m/% (Figura 1: b). Asumiendo que el vehículo puede operar de manera automática (tiempo de percepción-reacción igual a 0 s), la SSDR decrecería a 80 m (Figura 1: c). Por tanto, el acuerdo podría ser recorrido de manera autónoma.
Sin embargo, los actuales vehículos autónomos necesitan de un periodo de tiempo para recoger y procesar la información. Esto hace que el éxito del sistema dependa principalmente de lo rápido que puedan realizar esta gestión. En el ejemplo anterior, si el vehículo necesitase 1 s de percepción-reacción, la conducción sería manual.
Vehículo semiautónomo
A pesar de que cada fabricante de automóviles incorpora diferentes sensores y programa su propio sistema de Control de Crucero Adaptativo (ACC, por sus siglas en inglés) y Asistente de Mantenimiento de Carril (LKA, por sus siglas en inglés), las características técnicas de estos sensores y CPU son similares debido principalmente a que muchos de ellos comparten proveedores. Por tanto, podemos asumir que las diferencias en la operación entre los distintos vehículos semiautónomos son mínimas.
Concretamente, el vehículo utilizado para la toma de datos de esta investigación fue un BMW 520d de 2017 equipado con el paquete «Driving Assistant Plus», el cual dota al vehículo de un nivel de automatización 2 (Figura 3). Una vez se activan los sistemas ACC y LKA, el vehículo es capaz de operar de manera automática siempre y cuando el sistema disponga del tiempo y visibilidad suficientes para captar y procesar la información necesaria para ello.

Figura 3. Interior del vehículo BMW 520d de 2017 durante la toma de datos.
De manera simplificada, el proceso de conducción automatizada se puede dividir en tres fases o etapas:
- Recogida de información a través de las cámaras ubicadas en el retrovisor interior.
- Procesamiento de la información y emisión de respuesta a través de algoritmos de control y decisión.
- Ejecución de la maniobra.
Toma de datos
La toma de datos se llevó a cabo en carreteras interurbanas de la provincia de Valencia. En este sentido, se tomaron datos tanto en tramos de carretera convencional como de vías de alta velocidad (carreteras multicarril y autovías).
La geometría en planta de los tramos de carretera recorridos fue obtenida a partir de la metodología propuesta por el Grupo de Investigación en Ingeniería de Carreteras, mientras que el trazado en alzado se obtuvo a través de Autodesk Civil 3D utilizando datos LIDAR proporcionados por el Plan Nacional de Ortofotografía Aérea (PNOA).
Como resultado, se consideraron 50 acuerdos convexos que fueron recorridos a la velocidad límite de la vía. Los parámetros K de estos acuerdos variaron desde 2.7 m/% hasta 65.5 m/%, mientras que la diferencia de inclinaciones (A) lo hizo desde 0.36% a 11.85%. De todos los acuerdos analizados, 18 requirieron que el conductor tomara el control del vehículo.
Resultados
Para analizar la operación del vehículo semiautónomo a través de los acuerdos convexos recorridos se definió la variable Tiempo de Procesamiento Disponible (Available Processing Time, APT) como la relación entre la distancia de visibilidad disponible por las vídeo cámaras (SSDA,c) y la velocidad de operación durante la observación.
La Figura 4 representa la relación entre K y APT. En primer lugar, se observó que el sistema tiende a transferir el control lateral del vehículo al conductor cuando K es menor que 20-30 m/%, lo que está habitualmente relacionado con grandes valores de A. Además, aquellos acuerdos convexos que requerían de la intervención del conductor presentaron valores de APT menores que 3 s, mientras que el mínimo valor de APT asociado a una conducción autónoma fue de 2.5 s.
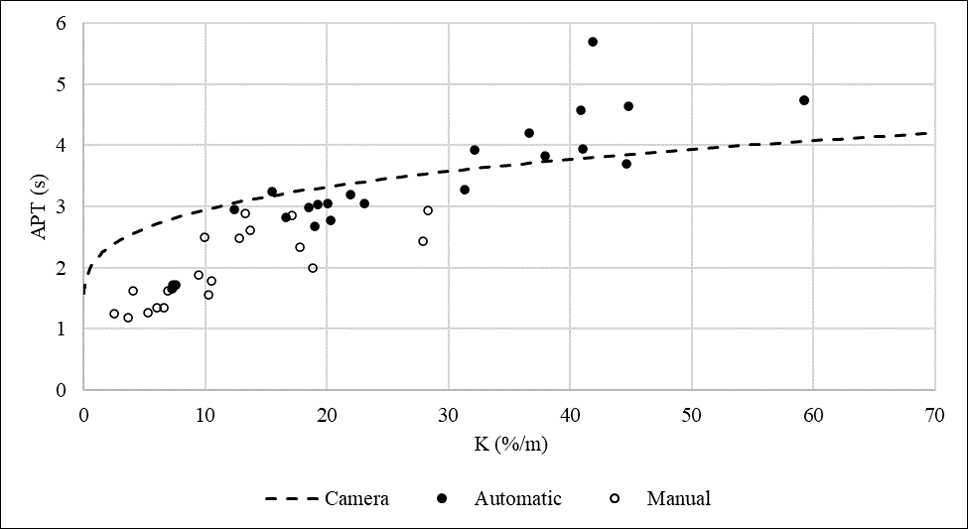
Figura 4. Relación entre K y APT dependiendo de la experiencia de conducción.
Por tanto, el sistema necesita más de 2.5 s para procesar la información recogida y tomar una decisión. Este procesamiento incluye la grabación, el procesamiento de los algoritmos correspondientes y el tiempo necesario para controlar el vehículo. En este sentido, cabe recordar que este resultado se obtuvo circulando a la velocidad límite de la vía.
La Figura 4 también muestra el Tiempo de Procesamiento Disponible si el conductor viajase a la velocidad de diseño (línea discontinua). Como se puede observar en la Figura 5, las velocidades de operación y límite son habitualmente mayores a la velocidad de diseño en aquellos acuerdos convexos más bruscos solapados con rectas en planta, lo que conduce a menores tiempos de procesamiento disponibles. Por el contrario, la velocidad de operación y la velocidad límite es menor que la velocidad de diseño para aquellos acuerdos convexos más suaves, lo que conlleva valores de APT mayores que los basados en los parámetros de diseño, permitiendo un mayor tiempo para procesar la información y tomar una decisión.
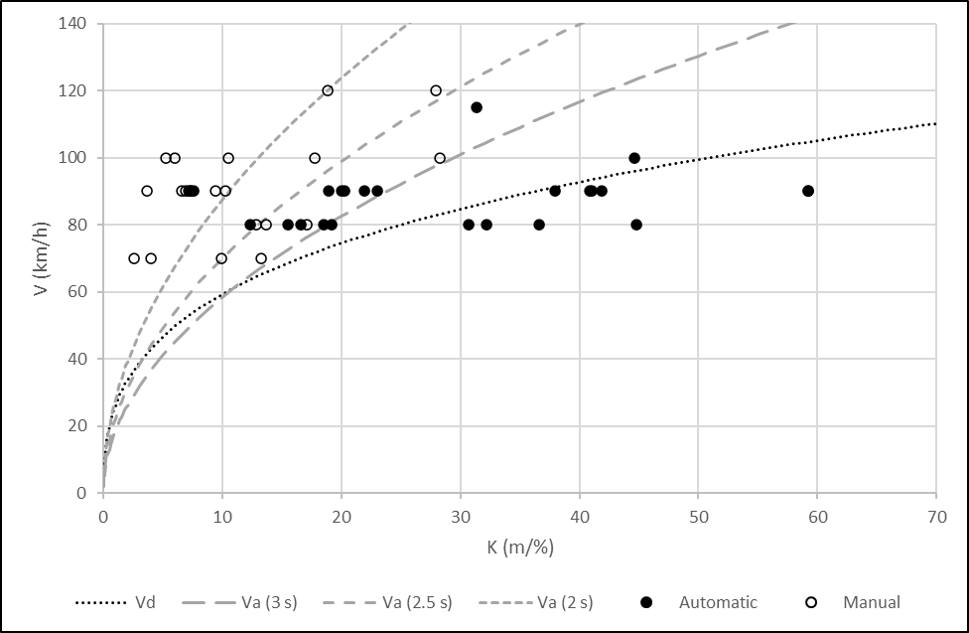
Figura 5. Relación entre la velocidad y el parámetro K de los acuerdos convexos.
Rescatando el concepto de velocidad automatizada introducido en la última entrada del blog, para el fenómeno que se estudia aquí esta velocidad puede estimarse a partir del cociente entre la distancia de visibilidad disponible por las vídeo cámaras (SSDA,c) y el mínimo Tiempo de Procesamiento Disponible (APTmin). En este sentido, la Figura 5 representa la relación entre la velocidad de operación y el parámetro K de los acuerdos convexos estudiados junto a distintas curvas que representan los valores de velocidad automatizada considerando distintos valores de APT. Comparando la curva relativa a la velocidad de operación (línea de puntos) con las obtenidas para un APT igual a 2.5 y 3 s, se puede decir que para acuerdos con un valor de K inferior a 10 m/% el vehículo no podrá operar de manera autónoma si viaja a la velocidad de diseño.
Conclusión
Los actuales sistemas instalados en los vehículos autónomos que encontramos en nuestras carreteras tienen dificultades para recorrer de manera autónoma acuerdos convexos con un parámetro inferior o igual a 30 m/%. En este sentido, valores de K inferiores a 10 m/% son sinónimos de conducción manual siempre y cuando el vehículo viaje a la velocidad límite de la vía. Para velocidades inferiores podría darse el caso de recorrerlo de manera automática.
Por otro lado, se ha identificado que el tiempo que requiere el sistema para procesar la información obtenida y tomar una decisión podría ser todavía demasiado elevado (2.5 s). Seguramente este valor decrecerá significativamente con el avance de la tecnología, siendo el objetivo principal de la industria un periodo de latencia de 0.1 s.
Si deseas profundizar todavía más en este fenómeno te recomiendo que le eches un vistazo a la siguiente publicación que presentamos en el Transportation Research Board Annual Meeting:
- García García, Alfredo; Llopis-Castelló, David; Camacho-Torregrosa, Francisco Javier (2019). Influence of the design of crest vertical curves on automated driving experience. En Transportation Research Board (TRB) 98th Annual Meeting, Washington, USA.
¿Te gustó el contenido de esta entrada? ¡Puedes dejar cualquier duda, curiosidad o sugerencia en los comentarios!