
Actualmente ya se encuentran circulando por nuestras carreteras vehículos autónomos con niveles de automatización 2 y 3. En esta línea, para 2030 se espera que ya circulen también vehículos de nivel 4 y que los niveles 2 y 3 representen gran parte del parque vehicular. Sin embargo, la fiabilidad de los sistemas de asistencia a la conducción autónoma depende en gran medida de las características de la infraestructura. En este sentido, la geometría de la carretera constituye una de las principales restricciones para la conducción automatizada.
Figura 1. Influencia del trazado en planta en la operación de vehículos autónomos.
Por ello, durante este mes de junio presentaré los resultados de los distintos estudios que hemos llevado a cabo recientemente en el Grupo de Investigación en Ingeniería de Carreteras (GIIC) de la Universitat Politècnica de València con el propósito de identificar aquellas configuraciones que conducen a los vehículos semiautónomos a ceder el control al conductor, es decir, bajo qué condiciones el vehículo no puede operar de manera automática o automatizada.
Específicamente, en esta primera entrada hablaré sobre los resultados relativos a la influencia del trazado geométrico en planta.
Objetivo
El principal objetivo de este estudio fue analizar cómo el trazado en planta influye en la operación de los vehículos semiautónomos (vehículos autónomos de niveles 2 y 3) mediante la identificación de aquellas circunstancias bajo las cuales el sistema de conducción automatizada del vehículo desconecta y cede el control al conductor.
Vehículo semiautónomo
A pesar de que cada fabricante de automóviles incorpora diferentes sensores y programa su propio sistema de Control de Crucero Adaptativo (ACC, por sus siglas en inglés) y Asistente de Mantenimiento de Carril (LKA, por sus siglas en inglés), las características técnicas de estos sensores y CPU son similares debido principalmente a que muchos de ellos comparten proveedores. Por tanto, podemos asumir que las diferencias en la operación entre los distintos vehículos semiautónomos son mínimas.
Concretamente, el vehículo utilizado para la toma de datos de esta investigación fue un BMW 520d de 2017 equipado con el paquete «Driving Assistant Plus», el cual dota al vehículo de un nivel de automatización 2 (Figura 2). Una vez se activan los sistemas ACC y LKA, el vehículo es capaz de operar de manera automática siempre y cuando el sistema disponga del tiempo y visibilidad suficientes para captar y procesar la información necesaria para ello.

Figura 2. Interior del vehículo BMW 520d de 2017 (Fuente: autofacil.es).
De manera simplificada, el proceso de conducción automatizada se puede dividir en tres fases o etapas:
- Recogida de información a través de las cámaras ubicadas en el retrovisor interior.
- Procesamiento de la información y emisión de respuesta a través de algoritmos de control y decisión.
- Ejecución de la maniobra.
Toma de datos
La toma de datos se llevó a cabo en carreteras interurbanas de la provincia de Valencia (Figura 3). En este sentido, se tomaron datos tanto en tramos de carretera convencional como de vías de alta velocidad (carreteras multicarril y autovías).

Figura 3. Localización de la toma de datos.
Específicamente, se observó el comportamiento del vehículo en más de 100 curvas, las cuales fueron recorridas a distintas velocidades para evaluar de una manera más precisa el fenómeno estudiado. Para ello, se instaló una video cámara en el punto de vista del conductor que grababa, además de la vista de la carretera y el entorno, el salpicadero o panel de control del vehículo donde se indica la velocidad y la operación del vehículo, siendo esta última variable medida como operación automatizada (el vehículo es capaz de recorrer la curva de manera automática) o manual (el vehículo cede el control al conductor) (Figura 4).

Figura 4. Toma de datos.
Las desconexiones del sistema del vehículo pueden darse por diferentes razones, tales como irregularidades en el pavimento, presencia de huecos en las marcas viales o mal estado de las mismas, condiciones lumínicas, condiciones meteorológicas, geometría de la carretera, etc. Además, algunas configuraciones geométricas como, por ejemplo, el solape de curvas en planta con acuerdos en alzado o la presencia de curvas consecutivas sin recta intermedia o con recta de longitud reducida también podrían sesgar los resultados de está investigación. Por tanto, las curvas que pudiesen estar influenciadas por alguna causa ajena al propio trazado de la misma fueron descartadas para la fase de análisis. Como resultado, se seleccionaron un total de 132 curvas aisladas con radios entre 172 y 3.858 m y un valor medio de 858,8 m.
Como se ha comentado anteriormente, se condujo a través de estas curvas a diferentes velocidades con el fin de identificar el umbral a partir del cual el sistema ya no era capaz de operar de manera automatizada. A este nuevo concepto de velocidad le denominamos «Velocidad automatizada» (Va). De esta manera, en una determinada curva se garantiza una conducción automatizada siempre y cuando el vehículo semiautónomo circule a una velocidad igual o menor a Va. En caso contrario, el sistema fallará y cederá el control del vehículo al conductor. Como es de imaginar, el número de veces que se circuló por cada una de las curvas fue distinto y dependió de lo fácil o difícil que fue encontrar esta velocidad.
Adicionalmente, las características geométricas de cada una de las curvas (radio, ángulo de deflexión, longitud, tasa de cambio de curvatura, etc.) fueron obtenidas a través de la restitución geométrica mediante el uso de un software desarrollado para tal fin por el GIIC.
Resultados
Como se esperaba, se identificó una estrecha relación entre el radio y la velocidad automatizada, representando esta última la operación del vehículo semiautónomo (Figura 5). Concretamente, la velocidad automatizada es mayor cuanto mayor es el radio de la curva.
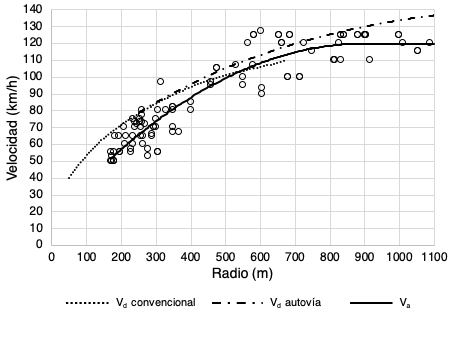
Figura 4. Velocidad automatizada Vs. Radio.
Además, la velocidad automatizada era mayor que la velocidad de diseño solo para unas pocas curvas. Esto significa que, desde el punto de vista del diseño actual de carreteras, no es posible asegurar una conducción automatizada en aquellas curvas con radios menores a 550 m.
Si además tenemos en cuenta que la velocidad de operación, entendida esta como la velocidad a la que realmente operan los conductores, es bastante mayor a la velocidad de diseño en curvas de radios reducidos, el problema de la operatividad de los vehículos autónomos se acentúa. En otras palabras, los actuales vehículos autónomos con nivel 2 de automatización no son capaces de operar de manera automática para radios reducidos bajo un régimen de velocidad habitual.
Ejemplo práctico
Como aplicación práctica, veamos cómo operaría este tipo de vehículos en un tramo de carretera real (Figura 6). El tramo en cuestión discurre por la carretera CV-50 entre los municipios de Villamarchante y Cheste. Como se puede observar, seis de un total de once curvas poseen una velocidad automatizada (AS, en la Figura 6) menor que la velocidad límite de la vía (90 km/h). Además, ocho de las curvas presentan una velocidad de operación (V85) superior a la velocidad automatizada.

Figura 6. Operación del vehículo semiautónomo en la CV-50 entre Villamarchante y Cheste.
A pesar de que durante la toma de datos en este tramo de carretera el vehículo semiautónomo reportó desconexiones durante el 35% del tiempo de su recorrido bajo una velocidad constante de 90 km/h, se espera que el sistema se desconecte en más del 70% de las curvas de acuerdo al perfil de velocidad de operación.
Conclusión
La velocidad automatizada identificada a partir del vehículo semiautónomo empleado es menor que la velocidad de diseño y, consecuentemente, que la velocidad de operación para curvas con radios menores de 550 m. Esto significa que el vehículo no es capaz de operar de manera automática en la mayoría de carreteras convencionales de nuestro país pero sí en carreteras de alta velocidad como son las autovías y autopistas.
¿Te gustó el contenido de esta entrada? ¡Puedes dejar cualquier duda o sugerencia en los comentarios!