
En esta entrada de hoy os traigo lo que fueron parte de los resultados que obtuve en mi Tesis Doctoral que presenté hace ahora un par de años. En este sentido, os intentaré explicar qué es la consistencia del diseño geométrico de carreteras y su relación con la seguridad vial y os presentaré el nuevo concepto de velocidad de operación inercial que definí en un primer momento en mi Trabajo Final de Máster y luego depuré su cálculo con el desarrollo de mi Tesis Doctoral. Así pues, ¡vamos a ello!
Introducción
Entre los diferentes factores que están presentes en la producción de un accidente de tráfico cabe destacar tres: el humano, el vehículo y la infraestructura. Particularmente, el factor infraestructura está presente en más del 30 % de los accidentes ocurridos en carretera. De hecho, los accidentes tienden a concentrarse en ciertos puntos de la red de carreteras. Por ello, el factor infraestructura y su interacción con el factor humano, que está presente en alrededor del 90 % de los accidentes, han sido estudiados profundamente en los últimos años a partir del concepto de consistencia del diseño geométrico de carreteras, que se define como el grado de adecuación entre las expectativas de los conductores y el comportamiento de la carretera.
El objetivo de la consistencia del diseño geométrico de carreteras es garantizar que sus usuarios no se vean sorprendidos a lo largo de la misma, es decir, se trata de conseguir que los conductores se encuentren a lo largo de la carretera con lo que ellos se esperan a partir de sus expectativas. En este sentido, un diseño consistente asegura que elementos geométricos sucesivos actúen de forma coordinada produciendo una conducción harmoniosa libre de sorpresas. De esta manera, el número de accidentes se vería reducido, puesto que se evitaría que se produjesen maniobras de conducción críticas asegurando unas condiciones del tráfico seguras. Por el contrario, un diseño inconsistente puede producir sorpresas en los conductores, lo que se traduce en la ejecución de maniobras erráticas o conflictivas aumentando la probabilidad de ocurrencia de accidentes.
“Un diseño consistente garantiza a los usuarios una conducción harmoniosa libre de sorpresas”
La mayoría de normativas de carreteras se basan en la velocidad de diseño (Vd) para determinar los parámetros mínimos (radio mínimo, distancia de parada…) de los elementos del trazado, recomendando utilizar valores superiores a los mínimos siempre que sea posible. Así, a la hora de diseñar las vías se suele huir de dichos valores mínimos, pero no existe un criterio de qué valores adoptar. Esto ocasiona generalmente que actúen como factores de decisión únicamente la orografía, la integración ambiental o un menor coste de la carretera, fijando las características finales del diseño geométrico.
Estas deficiencias presentes en la Instrucción pueden ser un factor determinante en la localización de los accidentes, produciéndose una concentración de los mismos en determinadas configuraciones del trazado de la vía, debido en muchas ocasiones a una incoherencia entre un elemento de la vía y su comportamiento general.
Ligado a esta problemática se encuentran los conceptos de seguridad nominal y seguridad sustantiva. La primera de ellas trata la seguridad vial como un absoluto, es decir, define un elemento geométrico o un tramo de carretera como seguro o no seguro. Por tanto, este concepto va ligado al cumplimiento o no de la norma. Por otra parte, la seguridad sustantiva trata la seguridad vial como un continuo. De esta manera, no existe un elemento o tramo de carretera seguro, sino que existen diseños más seguros que otros. Este concepto es la base de un diseño consistente, es decir, se trata de maximizar la consistencia para que el tramo diseñado responda a las expectativas de los conductores y, por consiguiente, ocurra el mínimo número de accidentes.
“En base al concepto de seguridad sustantiva no existen carreteras seguras y no seguras, sino carreteras más seguras que otras”
Todo ello deriva en el diseño de carreteras llamadas autoexplicativas. En este tipo de carreteras la operación se ajusta adecuadamente al diseño, por lo que los conductores no se ven sorprendidos por el trazado que recorren y, por tanto, la probabilidad de ocurrencia de accidentes es mínima.
Existen varios métodos para evaluar la consistencia del diseño geométrico de carreteras: velocidad de operación, estabilidad vehicular, índices de trazado y carga de trabajo del conductor. No obstante, el uso de la velocidad de operación para determinar la consistencia es el método más comúnmente empleado. La velocidad de operación se define como la velocidad a la cual los usuarios de la vía pueden conducir sus vehículos bajo condiciones de flujo libre y condiciones favorables de meteorología y sin exceder la velocidad segura en ningún momento. Esta definición no presenta aplicación práctica para el ingeniero, ya que no es determinable, por lo que tradicionalmente se asocia al percentil 85 de la velocidad (V85) a la que operan los vehículos ligeros en condiciones de flujo libre y sin restricciones ambientales.
La consistencia puede ser analizada a partir de dos tipos de criterios: locales y globales. Los criterios locales se basan en el análisis de la consistencia de un elemento aislado del trazado a partir de las deceleraciones que se producen entre elementos sucesivos o la diferencia entre la velocidad de operación y la de diseño. Este tipo de modelos son ideales para detectar en qué elementos del trazado es más probable que ocurran los accidentes. Por otro lado, los criterios globales tratan de evaluar la consistencia de un tramo completo empleando diferentes variables obtenidas a partir del perfil continuo de velocidad de operación asociado. A pesar de que estos modelos no indican dónde se producirán los accidentes, permiten estimar el número de accidentes en un segmento homogéneo de carretera a partir de una Función de Estimación de la Siniestralidad (Safety Performance Function, SPF).
No obstante, la mayoría de los criterios de consistencia desarrollados no son capaces de evaluar de manera precisa el grado de adecuación entre las expectativas de los conductores y el comportamiento de la carretera. Esto se debe a que no incorporan una variable capaz de representar y cuantificar las expectativas de los conductores. En este sentido, la consistencia de un determinado elemento del trazado no depende únicamente de las características de este elemento y su anterior, sino también de las características de varios elementos anteriores a este. Además, los modelos globales de consistencia están basados en variables que describen de forma general el comportamiento de un segmento de carretera homogéneo, tales como la velocidad o la tasa de deceleración medias, por lo que no son capaces de expresar adecuadamente las expectativas de los conductores.
Cabe destacar también que la actual normativa para el diseño de carreteras española únicamente incorpora criterios de consistencia locales que, además, no han sido desarrollados ni validados para su aplicación en nuestras carreteras.
Por ello, el objetivo principal de mi Tesis Doctoral fue desarrollar dos nuevos modelos de consistencia del diseño geométrico de carreteras convencionales, uno local y otro global, basados en la definición básica de consistencia. El parámetro fundamental de estos modelos se define como la diferencia entre la velocidad de operación inercial (Vi) y la velocidad de operación en cada punto (V85), que responde a la diferencia entre las expectativas de los conductores y el comportamiento del diseño geométrico de la carretera en cada punto, respectivamente. A mayor diferencia entre ambas velocidades, menos se ajustará el trazado de la carretera a las expectativas de los conductores y, por tanto, mayor será la probabilidad de ocurrencia de accidentes.
“La velocidad de operación inercial es una medida sustitutoria de las expectativas que los conductores adquieren mientras recorren la carretera”
Velocidad de operación inercial
El concepto de velocidad de operación inercial fue propuesto por primera vez en mi Trabajo Final de Máster. Entonces, la velocidad de operación inercial fue calculada en cada punto del trazado como la velocidad de operación media del último kilómetro de carretera recorrido y, partiendo de este concepto, se definió el Índice de Consistencia Inercial (ver Revista Rutas y Transportation Research Record).
No obstante, desde un punto de visto psicológico, el proceso de generación de expectativas de los conductores está estrechamente ligado a la memoria a corto plazo, la cual es decadente con el tiempo. Esto significa que los conductores recuerdan con mayor claridad aquello que recorren en última instancia y, por ello, sus expectativas dependen del tiempo transcurrido.
De esta manera, una velocidad de operación inercial definida como la velocidad de operación media ponderada basada en tiempo permitiría estimar con una mayor precisión las expectativas de los conductores que estimando dicha velocidad como una simple media en base a una determinada distancia, ya que dados distintos segmentos de carretera con diferentes velocidades de operación medias recorrer una determinada distancia conlleva distintos intervalos de tiempo.
De acuerdo a esta nueva definición, se identificó que la velocidad de operación inercial debía ser estimada como la velocidad de operación media ponderada de los últimos 15 segundos de carretera recorridos.
Si quieres profundizar más en este concepto, te recomiendo que leas el artículo publicado en la Revista Rutas que fue premiado con el V Premio Sandro Rocci para Jóvenes Profesionales que otorga la Asociación Técnica de Carreteras.
Modelo local de consistencia
El modelo de consistencia local viene definido por el Índice de Consistencia Inercial (ICI), el cual es calculado en cada elemento del trazado como la diferencia entre la velocidad de operación inercial (Vi) y la velocidad de operación (V85) en km/h:
![]()
La velocidad de operación inercial refleja las expectativas de los conductores, mientras que la velocidad de operación representa el comportamiento de la carretera. Así pues, cuanto mayor sea la diferencia entre ambas velocidades mayor será la tasa de siniestralidad, ya que el conductor desarrollará en ese punto una velocidad superior a la que realmente la carretera le permite . Este hecho fomentará que los conductores generen maniobras erráticas que, en última instancia, pueden acabar en accidentes de tráfico.
La siguiente tabla establece de manera cualitativa el nivel de consistencia en curvas de carreteras convencionales, mientras que la figura adjunta muestra las tasas de siniestralidad medias de cada uno de los niveles de consistencia definidos. Como se puede observar, la tasa de siniestralidad en una curva con consistencia pobre es aproximadamente dos veces y media la observada para una consistencia media y, a su vez, ocho veces a la identificada cuando la consistencia es buena.

Umbrales del modelo local de consistencia.
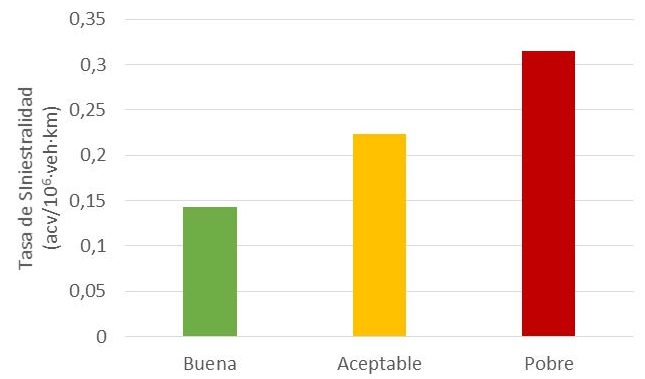
Tasa de siniestralidad media de los umbrales del modelo global de consistencia.
Modelo global de consistencia
El modelo global de consistencia permite a los ingenieros estimar el número de accidentes con víctimas en un determinado tramo de carretera a partir de la definición de una Función de Estimación de la Siniestralidad (SPF). Esta función depende de la intensidad de tráfico (IMD), la longitud (L) y la consistencia (C) del tramo de carretera:
![]()
donde Yi,10 son los accidentes con víctima estimados en un tramo de carretera en 10 años; L la longitud del tramo de carretera (km); IMD la intensidad media diaria de tráfico (vh/día); y C el parámetro de consistencia (km/h).
Concretamente, el parámetro global de consistencia (C) es estimado considerando la diferencia entre el perfil de velocidad de operación inercial y el perfil de velocidad de operación, que puede ser estimado a partir de modelos calibrados en la región o país donde la carretera se encuentra.
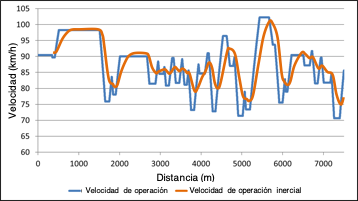
Perfiles de velocidad.
La siguiente expresión muestra el cálculo de este parámetro:
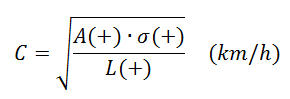
donde A(+) es el área encerrada por el diagrama que muestra la diferencia entre el perfil de velocidad de operación inercial (Vi) y el perfil de velocidad de operación (V85), y el eje x considerando únicamente las diferencias positivas (m·km/h); L(+) la longitud de tramo de carretera donde se producen diferencias de velocidad positivas entre Vi y V85 (m); y σ(+) la desviación estándar de la diferencia entre Vi y V85 considerando únicamente las diferencias de velocidad positivas (km/h).
La figura adjunta muestra la relación entre la tasa de siniestralidad y el valor del parámetro global de consistencia propuesto para los tramos de carretera estudiados. Como se puede observar, la tasa de siniestralidad es mayor a medida que el parámetro de consistencia aumenta. Por tanto, cuanto mayores son las diferencias entre la velocidad de operación inercial y la velocidad de operación, o lo que es lo mismo, entre las expectativas de los conductores y el comportamiento de la carretera, mayor es la probabilidad de ocurrencia de accidentes.
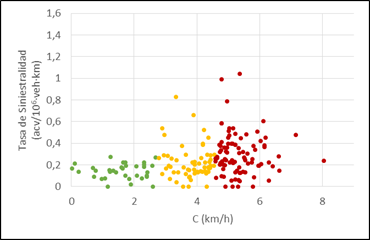
Tasa de siniestralidad y consistencia global.
Finalmente, la siguiente tabla permite evaluar el nivel de consistencia de un tramo de carretera de manera cualitativa. De acuerdo a esta definición, en la figura adjunta se observa como un tramo de carretera con una consistencia mala supone un aumento de la siniestralidad de un 40% con respecto a una carretera con una consistencia aceptable y, a su vez, registrará más del doble de accidentes que una carretera con una consistencia buena.

Umbrales del modelo global de consistencia.
Tasa de siniestralidad media de los umbrales del modelo global de consistencia.
Conclusiones
Las conclusiones más relevantes son:
- El cálculo de la velocidad de operación inercial como la velocidad de operación media ponderada permite cuantificar de una forma más precisa las expectativas de los conductores que calcularla a partir de la media aritmética, verificándose el comportamiento decadente de la memoria a corto plazo de las personas.
- Cuanto mayor es el Índice de Consistencia Inercial (ICI) mayor es la probabilidad de ocurrencia de accidentes, puesto que significa que existe una mayor incoherencia entre las expectativas de los conductores, representadas por la velocidad de operación inercial, y el comportamiento de la carretera, definido a partir de la velocidad de operación.
- La tasa de siniestralidad en una curva con un nivel de consistencia pobre es aproximadamente dos veces y media a la observada para un nivel de consistencia media y, a su vez, ocho veces a la identificada cuando el nivel de consistencia es bueno.
- Cuanto mayor es el parámetro de consistencia global C, mayores son las diferencias entre las expectativas de los conductores y el comportamiento de la carretera, lo que se traduce en una mayor tasa de siniestralidad.
- Un tramo de carretera con una consistencia mala supone un aumento de la siniestralidad de un 40% con respecto a una carretera con una consistencia aceptable y, a su vez, registrará más del doble de accidentes que una carretera con una consistencia buena.
- Mientras el modelo global de consistencia permite a los ingenieros estimar el número de accidentes con víctimas en un tramo de carretera a partir de la Función de Estimación de la Siniestralidad, el modelo local de consistencia les permite identificar dónde se concentrarán esos accidentes.
Finalmente, me gustaría agradecer el trabajo y esfuerzo de los profesores Alfredo García y Javier Camacho, que fueron los tutores de mi Tesis Doctoral. Junto a ellos he publicado diversos artículos científicos que recogen los resultados que aquí se han mostrado, entre los que cabe destacar:
- Llopis-Castelló, David; Camacho-Torregrosa, Francisco Javier; García García, Alfredo (2018). Calibration of the inertial consistency index to assess road safety on horizontal curves of two-lane rural roads. Accident Analysis & Prevention, 118, 1–10.
- Llopis-Castelló, David; Camacho-Torregrosa, Francisco Javier; García García, Alfredo (2018). Development of a global inertial consistency model to assess road safety on Spanish two-lane rural roads. Accident Analysis & Prevention, 119, 138–148.
¡No olvides comentar aquellos aspectos que consideres interesantes!
Los resultados que aquí se muestran forman parte del proyecto de investigación “CASEFU – Estudio Experimental de la Funcionalidad y Seguridad de las Carreteras Convencionales” financiado por la Agencia Estatal de Investigación – Ministerio de Ciencia e Innovación & Ministerio de Universidades.